로봇 개 모터 매개변수
게시 시간: 작성자: 사이트 편집자 방문하다: 681
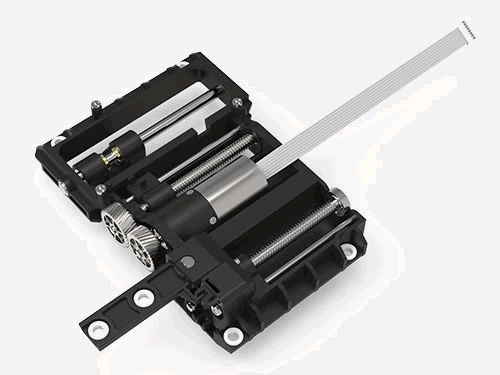
로봇 도그 모터는 지능형 로봇 도그 조인트 구동에 사용되는 마이크로 기어 모터 전송 시스템입니다. 주요 전달 구조는 구동 모터(마이크로 모터)와 기어박스(리듀서)로 구성됩니다. 로봇 개 관절 모터는 로봇 개를 구동하여 적응 적으로 걸을 수 있습니다. 로봇 개가 슬로프를 오르고 자갈길을 걸을 수 있도록 합니다. 고르지 않은 테라스를 걸을 때 전, 후, 상, 하, 요 각도, 피치 각도, 롤 각도를 제어할 수 있습니다. 이러한 종류의 기술 매개변수는 출력 전력, 출력 토크, 소음, 정밀도, 기어박스 전송 모드, 드라이브 모터 성능과 같은 사용자 정의가 필요합니다. ZHAOWEI Machinery & Electronics Co., Ltd는 포괄적인 맞춤형 서비스를 제공하기 위해 최선을 다하고 있습니다.
로봇 개 모터의 매개변수:
| 재료 | 금속 |
|---|---|
| 외경 | 24mm |
| 작동 온도 | -20℃~+100℃ |
| 회전의 방향 | cw&ccw |
| 기어 백래시 | ≤3° |
| 전압(선택 사항) | 3V~24V |
| 베어링 | 다공성 베어링/롤링 베어링 |
| 입력 속도 | ≤15000rpm |
| 축방향 엔드플레이 | ≤0.3mm/≤0.2mm |
| 현재의 | 최대 300mA |
| 출력축의 레이디얼 하중 | ≤120N/≤170N |
| 모터(옵션) | 스테퍼/DC 모터 |
커스터마이징
프로젝트 이름: 로봇 합동 모터
프로젝트 배경: 빠른 응답 상호 작용 및 통신에서 로봇용 기어 DC 모터는 로봇의 관절을 구동하는 데 사용되며, 이는 큰 동력 대 질량 비율 및 토크 대 관성 비율, 높은 시동 토크, 낮은 관성, 넓고 부드러운 속도 조정 범위. 특히 로봇 그리퍼는 부피와 질량이 작고 단시간에 과부하 용량이 큰 로봇 모터를 사용해야 한다.
성과: 로봇은 ZHAOWEI 유성 로봇 서보 모터와 결합되어 로봇의 품질과 효율성을 크게 향상시킬 수 있습니다. 로봇용 기어 DC 모터는 2단, 3단, 4단 변속이 가능합니다. 감속비, 입력 속도 및 기어 박스의 토크는 로봇 모터의 설계 요구 사항에 따라 조정할 수 있습니다.