로봇 기어 모터 매개변수
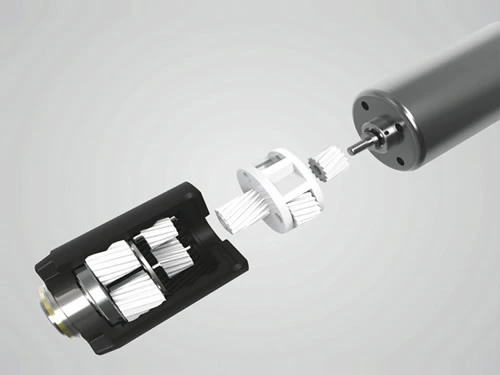
로봇 기어 모터는 지능형 로봇에 사용되는 기어박스와 미니 로봇 모터의 조합입니다. 구동모터(마이크로모터)와 기어박스(리듀서)로 구성된 감속변속기 시스템이다. 미니 로봇 모터는 감속 및 로봇 모터 토크 증가 기능이 있어 로봇이 움직이고 걸을 수 있습니다. 예를 들어 DC 브러시 모터, 서보 모터, 스테퍼 모터를 구동원으로 사용할 수 있으며 인코더를 설치할 수도 있습니다. 유성 기어 박스, 플라스틱 기어 박스 또는 금속 기어 박스, 웜 기어 박스, 평행 샤프트 기어 박스, 원통형 기어 박스는 감속기로 사용할 수 있습니다. 출력 전력, 출력 속도, 감속비, 출력 토크, 정격 전압, 직경, 기어박스 구조, 전송 소음, 전송 정확도, 작동 온도와 같은 매개변수는 맞춤형으로 개발되었습니다. ZHAOWEI Machinery & Electronics Co., Ltd는 맞춤형 기술 매개변수(직경: 3.4mm-38mm, 전압: 24V 미만, 출력 전력: 50W 미만, 출력 속도: 5rpm- 2000rpm, 기어비: 5-1500). 출력 토크: 1.0gf.cm -50kgf.cm. 기어 박스 백래시는 1-2 arc 분 이내이며 기어 전송 소음은 45dB 미만입니다.
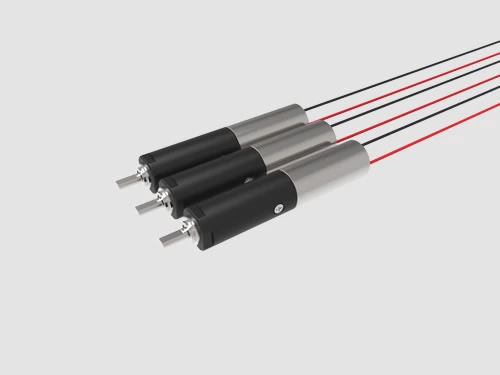
로봇 기어 모터의 매개변수:
| 재료 | 금속 |
|---|---|
| 외경 | 38mm |
| 작동 온도 | -30℃~+100℃ |
| 회전의 방향 | cw&ccw |
| 기어 백래시 | ≤2° |
| 전압(선택 사항) | 3V~24V |
| 베어링 | 다공성 베어링/롤링 베어링 |
| 입력 속도 | ≤15000rpm |
| 축방향 엔드플레이 | ≤0.1mm/≤0.1mm |
| 현재의 | 최대 300mA |
| 출력 샤프트의 레이디얼 하중 | ≤120N/≤180N |
| 모터(옵션) | 스테퍼/DC/서보 모터 |
커스터마이징
프로젝트 이름: 로봇 바퀴 모터
프로젝트 배경: 로봇은 이동 형태에 따라 바퀴형, 다리형, 크롤러형, 뱀형, 복합형으로 구분된다. 그 중 바퀴 달린 로봇은 자율이동 로봇 분야에서 상대적으로 중요한 위치를 차지하고 있다. 그들은 빠른 동작과 간단한 제어의 특성을 가지고 있으며 자동 팔레타이징 생산 라인, 무인 차량 및 기타 분야에서 널리 사용됩니다.
기술 성과: 바퀴 달린 로봇의 구동 부분은 DC 모터와 38mm 유성 기어박스의 조합을 비대칭 설치 방식으로 채택합니다. (로봇 바퀴용 스테퍼 모터도 일반형이다.) 이 방법은 바퀴 세트가 동축이고 큰 동력이 필요한 조건에서 감속기의 출력축의 힘을 줄이고 축거를 크게 단축시키며 공간을 절약할 수 있다. (일반적으로 모터의 크기와 동력은 일정 비율에 있습니다.) 이러한 방식으로 로봇 휠 모터의 크기가 작아질 수 있습니다.