





로봇 헤드 회전용 서보 모터
로봇 머리 회전을 위한 구동 시스템은 머리 흔들기, 머리 구부리기, 위아래 보기 등의 동작으로 로봇 머리를 보다 지능적으로 움직일 수 있도록 합니다. 이를 통해 로봇의 행동과 의사 소통이 보다 자연스럽게 나타나 상호 작용하는 경험을 얻을 수 있습니다.
로봇 헤드 회전 수요 유도
AI의 발전과 편리함에도 불구하고 로봇은 여전히 때때로 몇 가지 문제를 제기합니다. 로봇 머리는 위/아래를 볼 수 없고 회전할 수 없으며 얼굴이 표현력이 부족하여 잠재적으로 경험을 망칠 수 있습니다. 예를 들어, 시장에 나와 있는 교육용 로봇은 일반적으로 얼굴에 디스플레이 화면을 추가하여 상호 작용성을 향상시킵니다. 헤드 회전 장치는 로봇 헤드가 수평으로 회전하고 흔들릴 수 있지만, 이러한 로봇은 대부분 유연성이 떨어지고 제어가 복잡하여 비용이 많이 듭니다.
로봇 헤드 회전을 위한 단순 구동 시스템
로봇 머리 회전, 머리 흔들기, 위/아래 보기를 위한 간단한 구동 시스템이 만들어졌습니다. 랙과 피니언을 통해 동력이 전달되어 로봇이 쉽게 움직일 수 있습니다. 수직 베벨 기어에 부착된 로봇 헤드에는 2개의 자유도가 있습니다. 오른쪽 스테퍼 모터로 제어되는 수직축을 중심으로 회전하고 2개의 스테퍼 모터로 제어되는 수평축을 중심으로 회전합니다. 방향과 속도는 같아야 합니다. 5개의 회전 조인트 축이 모두 평행한 구형 메커니즘은 두 모터를 모두 접지 상태로 유지합니다.
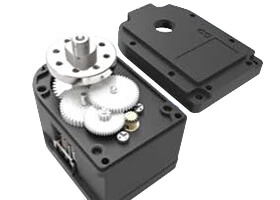
로봇 헤드 회전용 서보 모터
로봇 헤드의 지능형 회전은 서보 모터에 의해 제어되어 cw 및 ccw 회전을 달성할 수도 있습니다. 서보 모터 는 비교적 간단한 구조의 마이크로 기어 모터의 일종입니다. 이것은 소형 DC 모터, 감속 기어 세트, 기어 모터에 연결하여 위치 센서로 작동하는 전위차계 및 제어 회로 기판으로 구성됩니다.
뛰어난 방열
로봇 헤드의 회전을 구동하기 위해서는 모터가 필요하며 구동 모터는 구동 과정에서 열을 발생시키는 경향이 있다. 열이 제 시간에 발산되지 않으면 로봇 트렁크 내부의 회로 기판 작동이 영향을 받아 로봇 수명에 영향을 미칩니다. ZHAOWEI 서보 모터 드라이브 시스템은 지능형 로봇 헤드 회전에 활용될 수 있습니다. 2단, 3단 및 4단 변속기가 있으며 고객의 요구 사항에 따라 사용자 정의할 수 있습니다. 감속비, 입력 속도 및 토크도 조정할 수 있어 로봇 헤드가 인간의 동작을 모방하여 로봇의 수명을 연장할 수 있습니다.
로봇 헤드용 서보 모터의 고장 테스트
제품의 신뢰성과 안정성은 제품의 기술적 평가에서 매우 중요합니다. 각 제품의 성능을 정확하게 분석, 평가 및 검증하기 위해 ZHAOWEI는 고온/저온 테스트 챔버, 3D 진동 테스트 장치, 열 충격 테스트 챔버, 비 및 스프레이 테스트 챔버 및 비 및 스프레이 테스트 챔버.
산업 동향
로봇이 깜박임, 입 벌림, 끄덕임 등과 같은 기본적인 머리 및 얼굴 움직임을 달성할 수 있다면 더 많은 수요를 얻게 될 것입니다. 요즘 로봇 서보 모터의 사용이 더욱 광범위해지고 있습니다. 서비스 로봇 감속기에 대한 수요는 주로 엔터테인먼트 및 교육 로봇과 같은 소형 로봇과 가족 보조, 협동 로봇과 같은 대형 로봇에서 비롯됩니다. 소형 로봇은 소형이지만 높은 신뢰성, 클러치 메커니즘, 높은 가격 대비 성능 비율 및 해당 소형 기어 모듈을 갖춘 기어 모터가 필요합니다. 반면에 대형 서비스 로봇용 기어 모터는 전체적으로 낮은 반동, 높은 출력 밀도, 긴 수명, 충격 저항 등으로 설계되었습니다. ZHAOWEI는 당사의 마이크로 드라이브 시스템이 로봇 제조업체가 지능적이고 기술적인 로봇을 만드는 데 도움이 될 것이라고 믿습니다.
로봇 헤드 기어박스
로봇 헤드 기어 모터

로봇 감속기



